Physics Kinematics Formula Sheet
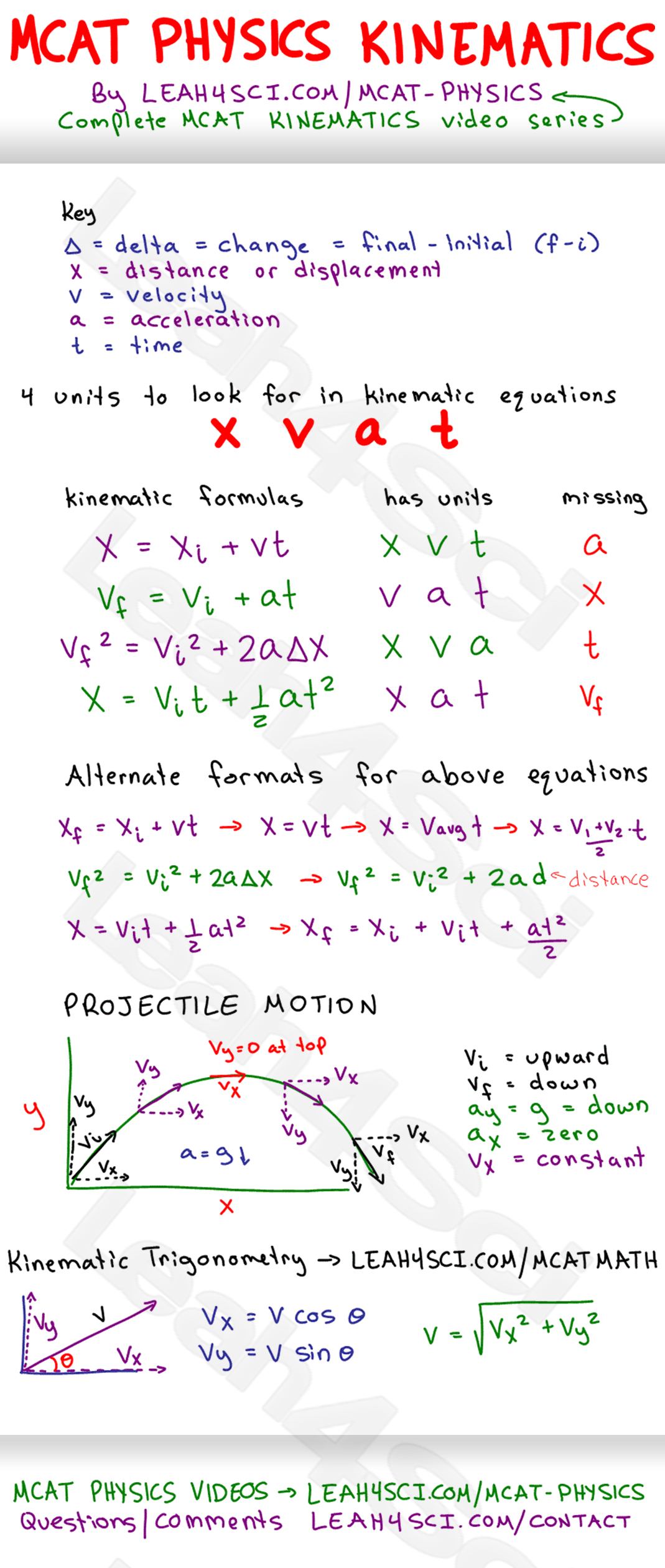
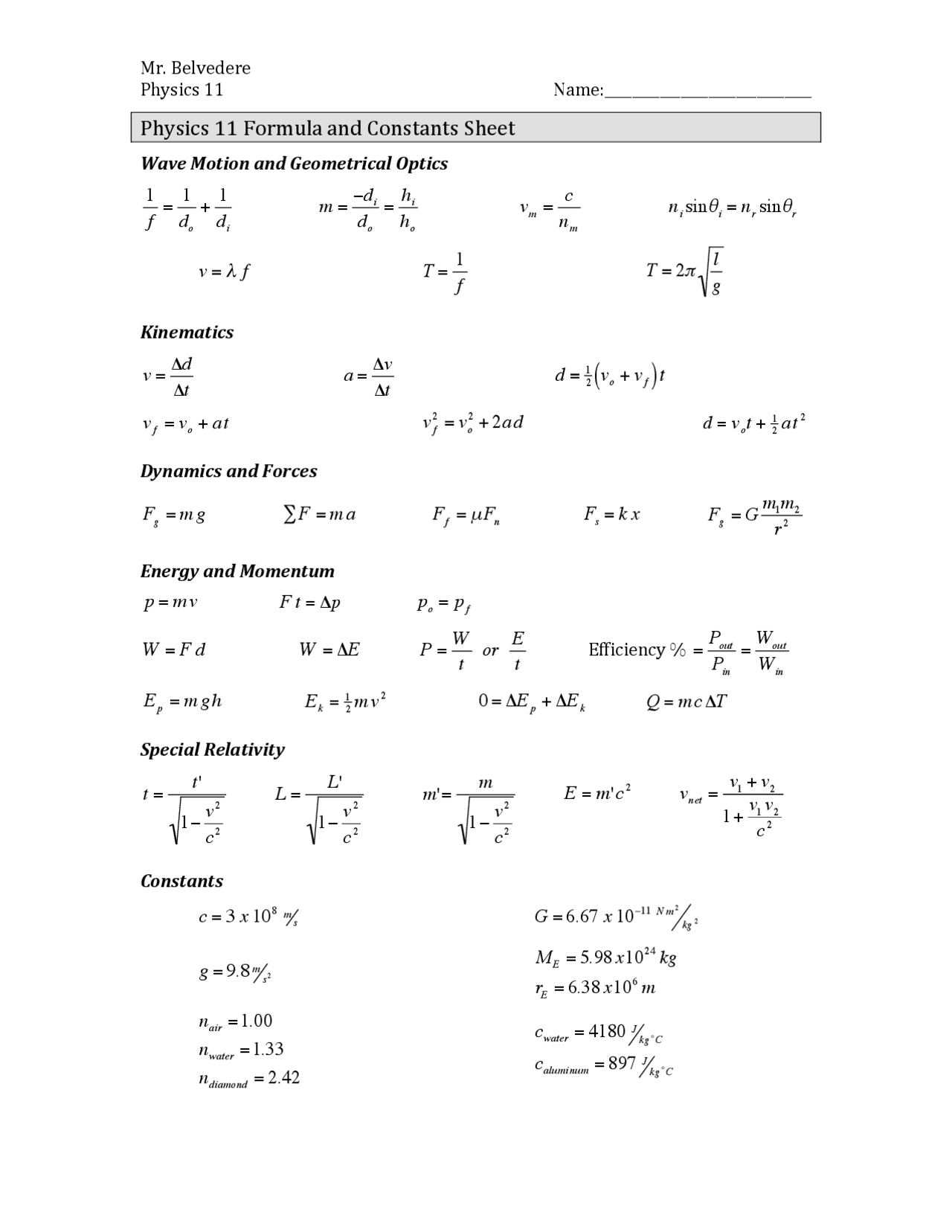
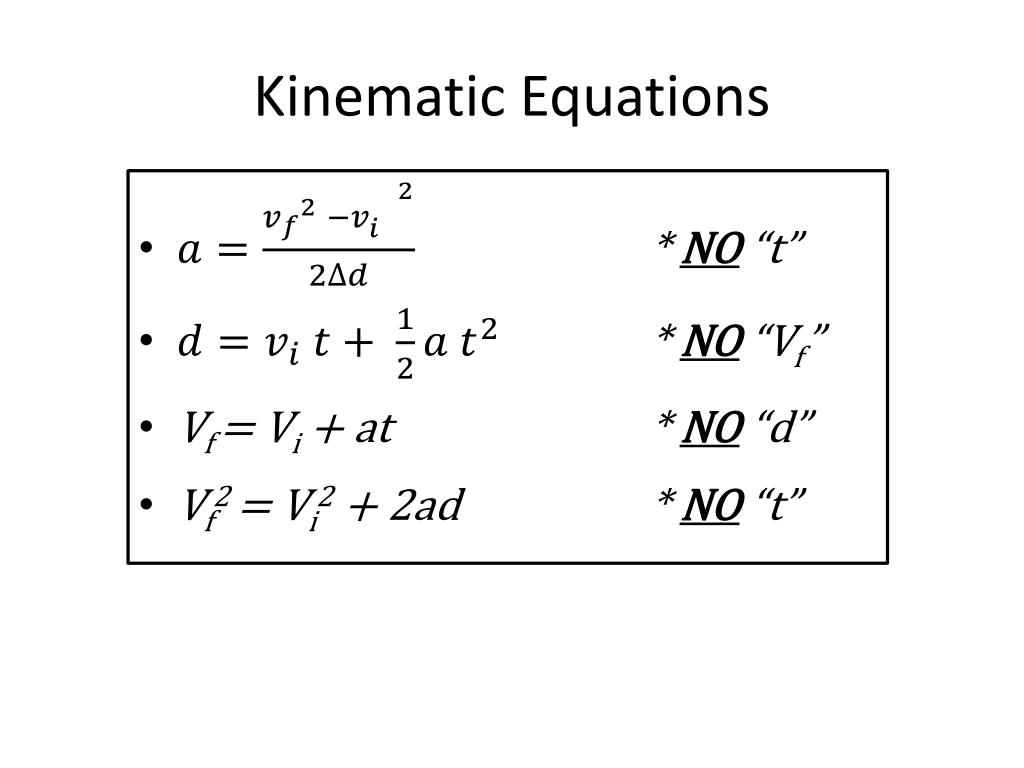
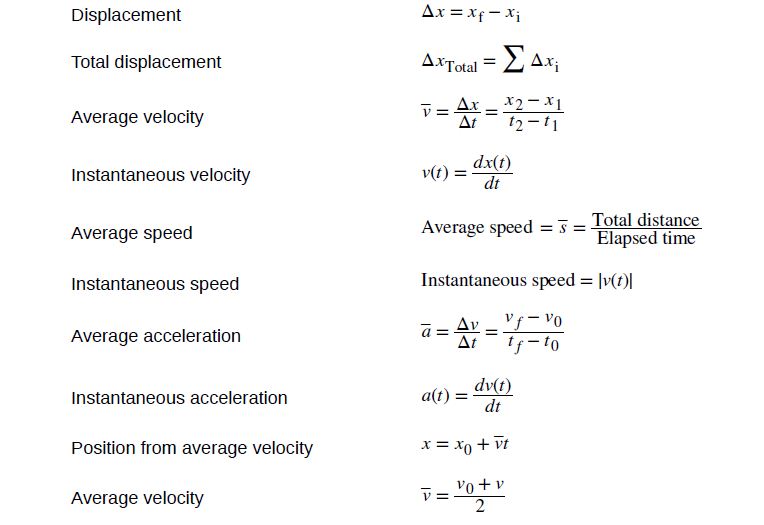
Physics Kinematics Formula Sheet - Web the kinematic equations are a set of four equations that can be utilized to predict unknown information about an object's. Web r = mgy (potential energy due to gravity, universal law) (potential energy due to gravity, near earth’s surface) = kx2. Web kinematics and mechanics x = x0 + v0t + 1 at2 2 v = v0 + at f = ma etot = k + u 1 k = v2 ac = r p2 2mv2 = 2m p = mv electrostatics.
Web kinematics and mechanics x = x0 + v0t + 1 at2 2 v = v0 + at f = ma etot = k + u 1 k = v2 ac = r p2 2mv2 = 2m p = mv electrostatics. Web r = mgy (potential energy due to gravity, universal law) (potential energy due to gravity, near earth’s surface) = kx2. Web the kinematic equations are a set of four equations that can be utilized to predict unknown information about an object's.
Web the kinematic equations are a set of four equations that can be utilized to predict unknown information about an object's. Web kinematics and mechanics x = x0 + v0t + 1 at2 2 v = v0 + at f = ma etot = k + u 1 k = v2 ac = r p2 2mv2 = 2m p = mv electrostatics. Web r = mgy (potential energy due to gravity, universal law) (potential energy due to gravity, near earth’s surface) = kx2.
MCAT Kinematic Equations Study Guide Cheat Sheet
Web r = mgy (potential energy due to gravity, universal law) (potential energy due to gravity, near earth’s surface) = kx2. Web the kinematic equations are a set of four equations that can be utilized to predict unknown information about an object's. Web kinematics and mechanics x = x0 + v0t + 1 at2 2 v = v0 + at.

Physics Kinematics Equations Cheat Sheet Tessshebaylo
Web kinematics and mechanics x = x0 + v0t + 1 at2 2 v = v0 + at f = ma etot = k + u 1 k = v2 ac = r p2 2mv2 = 2m p = mv electrostatics. Web r = mgy (potential energy due to gravity, universal law) (potential energy due to gravity, near earth’s surface).
Physics about kinematics formula sheet Cheat Sheet Physics Docsity
Web the kinematic equations are a set of four equations that can be utilized to predict unknown information about an object's. Web kinematics and mechanics x = x0 + v0t + 1 at2 2 v = v0 + at f = ma etot = k + u 1 k = v2 ac = r p2 2mv2 = 2m p =.

Physics Kinematics Equations Cheat Sheet Tessshebaylo
Web r = mgy (potential energy due to gravity, universal law) (potential energy due to gravity, near earth’s surface) = kx2. Web kinematics and mechanics x = x0 + v0t + 1 at2 2 v = v0 + at f = ma etot = k + u 1 k = v2 ac = r p2 2mv2 = 2m p =.

Physics formula sheet PHYS*1 300 FORMULA SHEET Kinematics & Dynamics
Web the kinematic equations are a set of four equations that can be utilized to predict unknown information about an object's. Web r = mgy (potential energy due to gravity, universal law) (potential energy due to gravity, near earth’s surface) = kx2. Web kinematics and mechanics x = x0 + v0t + 1 at2 2 v = v0 + at.

2020 12 07 formula sheet 1000H Formula Sheet 1. Kinematics & Dynamics
Web kinematics and mechanics x = x0 + v0t + 1 at2 2 v = v0 + at f = ma etot = k + u 1 k = v2 ac = r p2 2mv2 = 2m p = mv electrostatics. Web r = mgy (potential energy due to gravity, universal law) (potential energy due to gravity, near earth’s surface).

Physics Formula Sheet Kinematics Physics Formula Info
Web kinematics and mechanics x = x0 + v0t + 1 at2 2 v = v0 + at f = ma etot = k + u 1 k = v2 ac = r p2 2mv2 = 2m p = mv electrostatics. Web the kinematic equations are a set of four equations that can be utilized to predict unknown information about.

Simple Sheet of Kinematic Equations
Web kinematics and mechanics x = x0 + v0t + 1 at2 2 v = v0 + at f = ma etot = k + u 1 k = v2 ac = r p2 2mv2 = 2m p = mv electrostatics. Web r = mgy (potential energy due to gravity, universal law) (potential energy due to gravity, near earth’s surface).
Kinematic Equations Formula Sheet Images and Photos finder
Web r = mgy (potential energy due to gravity, universal law) (potential energy due to gravity, near earth’s surface) = kx2. Web kinematics and mechanics x = x0 + v0t + 1 at2 2 v = v0 + at f = ma etot = k + u 1 k = v2 ac = r p2 2mv2 = 2m p =.
Kinematics equations or motion equations cheat sheet or reckoner
Web r = mgy (potential energy due to gravity, universal law) (potential energy due to gravity, near earth’s surface) = kx2. Web kinematics and mechanics x = x0 + v0t + 1 at2 2 v = v0 + at f = ma etot = k + u 1 k = v2 ac = r p2 2mv2 = 2m p =.
Web R = Mgy (Potential Energy Due To Gravity, Universal Law) (Potential Energy Due To Gravity, Near Earth’s Surface) = Kx2.
Web the kinematic equations are a set of four equations that can be utilized to predict unknown information about an object's. Web kinematics and mechanics x = x0 + v0t + 1 at2 2 v = v0 + at f = ma etot = k + u 1 k = v2 ac = r p2 2mv2 = 2m p = mv electrostatics.